

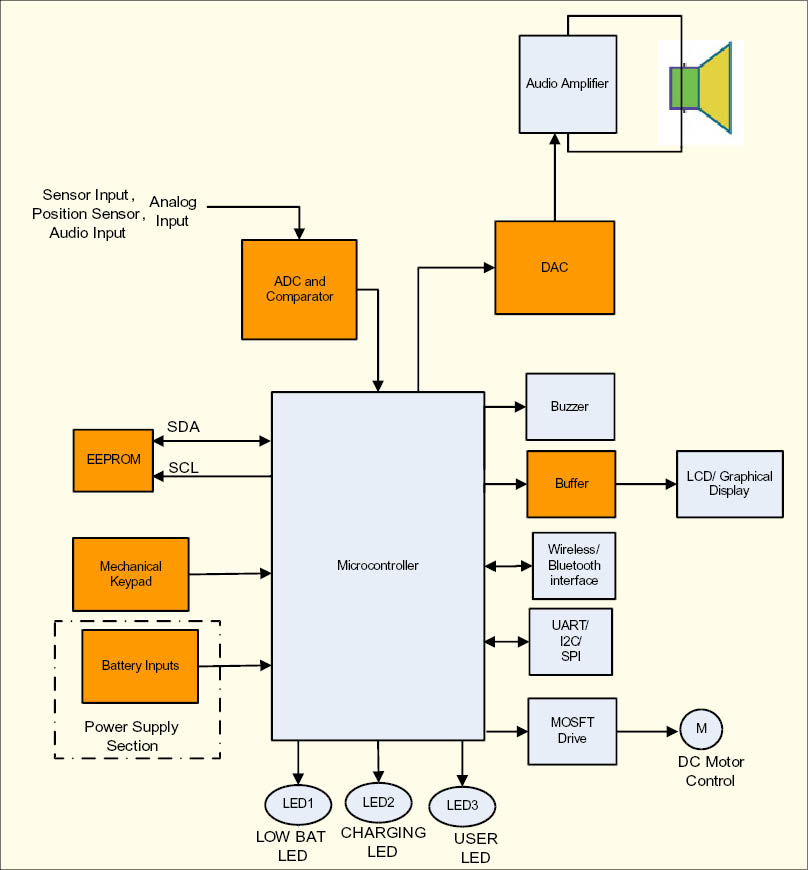
Microcontrollers in current Electronic toy applications is mainly used for IR interface, External EEPROM interface, Analog inputs using external ADCs and comparators, Battery input monitoring, Timer and clock interfaces, Controls front panel mechanical keypad and displays the results on LCD/ LED/ Graphical displays.
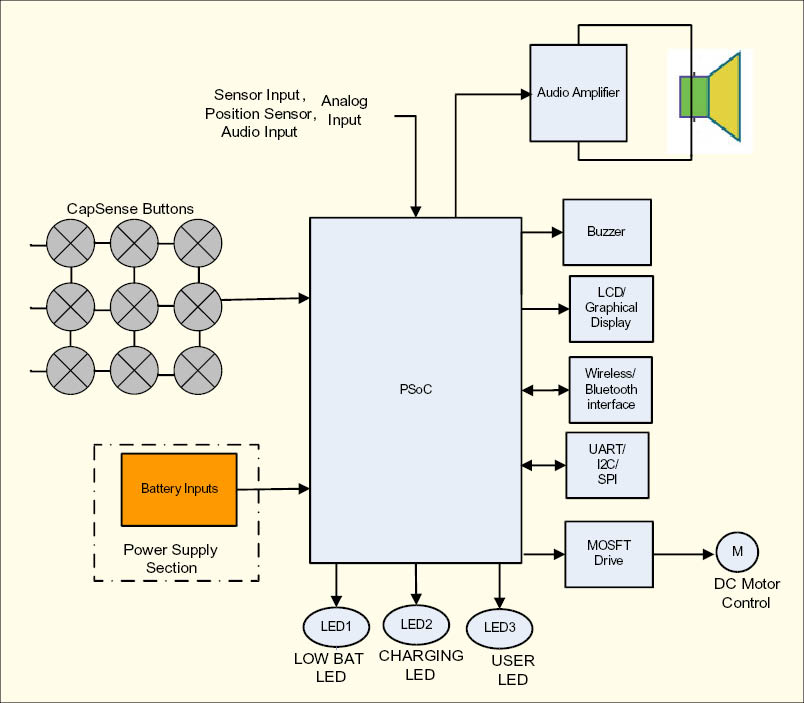
Programmable SOCs devices can be used in Remote Control System as a single board solution for IR interface, Battery input detection, Analog measurements. Direct drive LCD/ Graphical displays. Programmable SOCs devices supports CapSense technology which will replace mechanical buttons on the keypad.
Using IDE tool of SOC devices all the interface and logic can be designed. IDE tool is having readily available component block for designing the interface and logic like IR, ADC for analog inputs, PWM for Buzzer application, DAC, Segment, Character or Graphical LCD display support.

This article discusses role of MCUs and PSoC in Electronic toy applications. It also evaluates the system limitations and design challenges for these applications. With Programmable SOCs devices can reduce the complete product cost (by reducing the BOM cost) and project cost (Implementation in IDE Tool) in Electronic toy applications.
Theory
The current electronics toy applications uses 8/16 bit MCU for different functions like: motor control, LED/LCD/ Graphical display drive and different input and Output interfaces, Battery sensing and audio output. Microcontroller in CSP package is most commonly used in the Electronics toys applications.
MCU receives analog input signals from analog sensors (sensors which receives the analog inputs and provides the digital voltage which will be applied to the MCU), 2 axis / 3 axis accelerometer (Accelerometer measures the 2 axis / 3 axis movement and converts in to the digital voltage which will be applied to the MCU), MCU also uses the accelerometer and mechanical joystick for running gaming applications.
MCU uses external buffer driver circuitry to drive LED, LCD or graphical displays. Typically LCD or graphical display with backlight is used in the low end applications. It also controls the backlight of LCD and graphical displays. MCU uses touch screen controller for touch screen interface in high end applications.
MCU uses mechanical keypad for the user inputs in the low end applications. MCU uses CapSense/ touch screen based keypads in high end applications. MCU interfaces with other onboard peripherals (like camera interface controller) through I2C, SPI and UART interfaces.
The Toy applications are battery power operated, it uses coin cell or Li-Ion battery for the operation.
MCU monitors the coin cell and Li-Ion battery voltage and also used for battery charging application. MCU is also used for fault detection and data recovery applications.
Microcontroller on proprietary 2.4GHz technology is targeted for remote controlled toys segments, gaming controllers and remote controlled toys segments are also witnessing customers shifting from IR to RF frequency range.

Implementation of PSoC in Electronics toy applications:
PSoC is a combination of a MCU with programmable logic and high-performance analog to digital conversions and commonly used fixed-function peripherals. The PSoC family is made up of 8bit (PSoC 1 and PSoC 3), and 32 bit MCUs (PSoC4 and PSoC5). They have flash memory up to 256KB, SRAM up to 64KB and internal EEPROM up to 2KB (flash can be used to emulate EEPROM). PSoC works on ultra low power mode. In low power mode it consumes <1µA current, making it useful when operating a toy in low power mode and with coin cell battery input.
PSoC has an internal RTC component for real time measurement. It does not require external clock/oscillator circuitry.
PSoC supports USB 2.0 interface, allowing the user to interface external memory through USB 2.0. It supports Secure Digital (SD) card interface.
PSoC has internal PWM, which is used for controlling and varying the tone of the buzzer for every key press in electronics toy applications. The duty cycle of the PWMs is varied based upon the speed required as set by the user through the GUI/ keypad interface. PSoC has an internal 8-bit DAC, which can be used for controlling speaker volume and also performs mute function for the audio speaker.
PSoC has internal Op-amp, Comparators and 12-bit 1MSPS Successive approximation ADC with differential and single-ended modes including sample-and-hold (S/H) capability which is used to measure different sensor inputs, Battery monitoring. So it does not require external amplifiers, ADC and comparators for electronics toy applications.
PSoC has operating rage of 1.71V to 5.5V so it can be easily interface with external peripherals for other applications. PSoC supports low operating voltage up to 1.71V and ultra low power (it consumes <1µA current) operation along with Hibernate and Deep Sleep modes which allow wakeup-time versus power trade-off it will help to support larger battery life/ power supply life. PSoC supports two independent run-time reconfigurable Serial Communication Blocks (SCBs) with re-configurable I2C, SPI, or UART functionality which will be helpful in internal and external peripheral communication.





