

Drones Introduction
A drone, formally called as unmanned aerial vehicle, is an unmanned flying object. It is primarily controlled by remote control or inbuilt intelligence for navigation. It is a prime example of how embedded systems work together to bring a complete system which can navigate, self-balance, attain height and transfer information with the remote user or machine.
Traditionally drones have been used for many defense and scientific applications such as reaching remote areas, surveillance, weather monitoring and delivering goods in tough conditions. In the recent times with the advent of low-cost, small-size and low-power embedded technologies drones are increasingly used in consumer applications. Drones are now used as toy, photography assistance, cargo delivery vehicle, pesticide spraying vehicle etc.
Drones are attracting significant level of interests from startups, students, system integrators, solution providers, e-commerce and technology providers. Drones are expected to make our lives better, safer and more efficient.

This article elaborate major advancements in drone sensor and lower power connectivity technologies which are key to its exponential growth in recent times. .
Drones Attributes
Drones are expected to be very precise in their movement, be stable, attain expected height and communicate effectively. So a typical drone should have following attributes.
a) Stable
A drone is expected to be stable and do not shake, wobble or tilt unexpectedly. Else it will lose its balance and fell down.
b) Precise
A drone should be very precise its movement. The movement may be in terms of distance, velocity, acceleration, direction and altitude.
c) Resistant to environment
A drone should be resistant to rain, dust, heat and other environment conditions. This applies not only to the outer material but also to the electronics which is used inside a drone.
d) Low Power
Drone are expected to be lighter so it is important to ensure that it consumes ultra-low power to minimize the size of battery. The emergence of low power technologies has enabled democratization of drones’ technology.
e) Environment aware
Environment sensing is emerging as a key growth area for drones. Today drones are powered by several sensors to monitor the environment. The data is used for variety of applications such as weather monitoring, agriculture etc.
f) Connected
Connectivity is the most important factor for emergence and acceptance of drones. Drones can be controlled by simple smart phone, a remote controller and directly the cloud. Depending upon the use case a right connectivity solution should be used. Sometime drones use multiple connectivity solution for multipurpose use cases.
Role of Sensors in Drones
Core Sensors
These sensors form the core part of drone and ensure its proper functioning and navigation. These sensors are accelerometers, gyroscope, magnetic compass and barometer sensor.
Accelerometer
Accelerometer is used to provide the acceleration force which the drone is subjected to in all three axis X, Y and Z. It also determines the tilt angle of drone in stationary position. If the drone is stationary in horizontal position then its X and Y axis will give 0g output whereas z-axis will give 1g output. 1g is the gravity which is experienced by every object on earth. If the drone rotate by 90deg on X axis then X and Z will give 0g and Y axis will start will start giving 1g. During the tilt X, Y and Z will give output which lies between 0 and 1g. The values can then be applied to trigonometry formulas to arrive at tilt angle of drone.
Accelerometer are also used to give linear acceleration in horizontal and vertical direction. This data can be used to calculate velocity, direction and even rate of change of altitude of the drone. Accelerometer is also used to detect the vibration which the drone is experiencing.
Accelerometer is a very important sensor in any drone as it provide critical inputs even when drone is in stationary position.
Gyroscope
Gyroscope sensor detects angular velocity in three axis. So it can detect rate of change of angle in pitch, roll and yaw. Gyroscope is a critical sensor even in regular craft. The change in angle information is used to provide stability to drone and to prevent it from wobbling. The information from gyroscope is fed to motor control drivers to control the speed of motors dynamically to provide the stability to motor. Gyroscope also ensure that drones rotate at exact angle which is expected by user controls.
STMicroelectronics latest innovation, LSM6DSM, is an IMU with combination of accelerometer and gyroscope. It also offers two independent gyroscope outputs – a feature that can be used for flight control and, at the same time, for the camera stabilization (OIS/EIS function), if available in the drone.
Magnetic Compass
Magnetic compass as the name suggests gives the sense of direction to the drone. It gives data of magnetic field in three X, Y and Z which the device is subjected to. This data is then fed into algorithm in the microcontroller to give heading angle w.r.t magnetic north. This information is then used to detect geographical directions.
To get accurate direction the magnetic data should be complemented by tilt angle data from the accelerometer. The tilt data along with magnetic data will then be used to calculate accurate direction.
A magnetic compass is very sensitive to hard iron, soft iron or angle of operation. Hard iron is the presence hard permanent ferro-magnetic material in the vicinity of sensor. It create a permanent shift in compass reading. Soft iron is the presence of weak ferro-magnetic material, circuit traces etc. It create a variable shift in the sensor reading. So a magnetic sensor calibration algorithm is needed to filter out these anomalies. It is important for the algorithm to do fast calibration with minimum effort by the user.
Apart from direction sensing, magnetic sensor can also be used to detect surrounding magnetism and ferro-metals such as electricity poles, wires, vehicle, other drones etc. to help avoid accident.
Barometer
A barometer working principle is to convert atmospheric pressure into altitude. Pressure sensor can detect earth’s atmospheric pressure. The data from Barometer helps in drone navigation and achieve desired altitude. Very good estimation of ascend and descend speeds is very vital for drones flight control. STMicroelectronics has introduced pressure sensors, LPS22HD, with 200Hz of data rate to address this requirement of altitude estimation.
Important characteristics for sensors in drones
Drones are subjective to extreme conditions including vibration, noise and environment. A sensor used in drone should have high shock survival capability, should capture less noise and fast enough to capture all vibration. Its performance should not vary with change in environment parameters such as temperature and humidity. And finally it should consume ultra-low power to have enhanced battery life.
Role of Algorithms
Software libraries play an important role to convert raw sensor data into meaningful use case. The algorithm augment the function of sensor beyond their stated features. The algorithm also combine the input from various sensors and create a context aware output. The three motion sensors – accelerometer, gyroscope and magnetic compass – have their own advantages and disadvantages. Sensor limitations include imperfect calibration, drift over time or temperature and random noise. Magnetometer and Accelerometer are subject to distortions and gyroscope has inherent drift. Sensor fusion library is used to calibrate there sensors with each other to create a condition which gives accurate result in all scenarios. It not only give calibrated sensor outputs but also angle and heading angle information and Quaternion angles.
Applications Specific Sensors
These sensors do not impact the core functioning of drone but are increasingly used in drones for variety of applications such as weather monitoring, farming etc.
Humidity Sensor
Humidity sensor can detect humidity parameter which can be used at weather station, condensation level monitoring, air density monitoring and gas sensors measurement correction.
ST has introduced a humidity sensor HTS221 which includes a sensing element and an analog front end to provide the measurement information by digital serial interface. The sensing element consists of a polymer dielectric planar capacitor structure able to detect relative humidity variations.
MEMS Microphone
MEMS Microphone is audio sensor that converts sound signals into electrical signals. MEMS Microphones are increasingly preferred over conventional microphones as they offer higher SNR, small form factor, digital interface, better RF immunity and high robustness against vibration. The sensors are in in drones for applications such as videography, surveillance, spying etc.
Connectivity in Drones
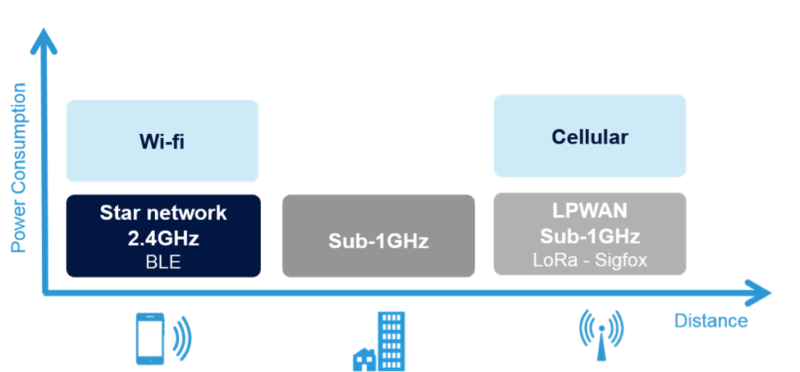
There are various connectivity options considered for drones. BLE and Wi-Fi are used for smart phone connectivity, sub-1GHz is used for connectivity with remote controller and give longer distance connectivity. Cellular and Long range technologies such as LoRa and Sigfox are used to collect information from drone directly to telecom infrastructures.
The map of various technologies on scale of distance and power consumption is listed below. We will discuss lower power technologies such as BLE, RF sub-1GHz and Sigfox in a greater detail.
Bluetooth low Energy – Bluetooth Smart [BLE]
Bluetooth Smart or Bluetooth Low Energy [BLE] enables low power connectivity to drones. It is suitable for low range drones particularly the toy drones. It enable two way communications between drones and control devices such as smartphone, tablet, laptop and dedicated remote controller. BLE allows drones to have incredible battery life which is not possible using traditional wireless technologies such as Wi-Fi and Classical Bluetooth.
Bluetooth Low Energy works in license free 2.4GHz ISM band. The standard is governed by Bluetooth Special Interest Group (SIG) and is support all the major smartphone brands.
There are two major partitioning available in BLE devices.
a. Network processor
A network processor is a BLE device which is running BLE protocol including controller, Host and stack. But it need a separate microcontroller for its functioning with main microcontroller running BLE profiles and application. This platform is also platform independent so offers wide flexibility to user to select best fit microcontroller or operating system. BlueNRG-MS is a network processor offered by ST and compatible with BLE 4.1. This IC can act as Master and Slave at the same time. So it is possible to have a remote controller acting as slave to Smartphone but master of drone.
b. System on Chip
System on Chip (SOC) is a devices which is an independent chipset and includes controller, Host, stack profiles and application. BlueNRG-1 from ST is BLE 4.2 certified SOC and includes 15 GPIOs, I2C, SPI, UART, PWM, PDM and 160kb of RAM. This IC also offers advance security and privacy features offered by BLE 4.2.
RF sub-1GHz
RF sub-1GHz as the name suggests carries signal over sub-1GHz frequencies. Different countries have defined different frequencies which can be freely used for Industrial and scientific usage.
Below are some of free bands available in various countries
• North America : 315, 433, 915Mhz
• Europe : 433, 868Mhz
• India : 433, 865-867Mhz
The advantage of sub-1GHz frequencies is that they are relatively quieter bands, have a longer range and consume low current. Down side is that they do not offer direct smartphone connectivity and not universally present.
Sigfox is subscription based LPWAN service based on sub-1GHz frequencies. Sigfox allows connectivity directly to telecom infrastructure and in-turn to cloud. It can give connectivity over several Km. In drones Sigfox can be used for tracking and to send sensor data to the cloud. It is low data rate technology directly to telecom infrastructure so not expected to replace direct control connectivity options such as BLE and RF sub-1GHz direct peer to peer connection.
STMicroelectronics has recently launched RF sub-1GHz and Sigfox transceiver S2-LP. This product can communicate at 430-470 MHz and 860-940 MHz. It has output power up to +16dbm and sensitivity down to -130dbm.This extremely low current IC can be used as peer to peer connection to establish connection between drone and remote controller. It is also a certified Sigfox product so it can be configured to directly connect drone to Sigfox network.
Development platform
The wave of emerging applications such as drones is mainly driven by startups and young Engineers. Moreover the market is evolving at such a fast pace that chancing of success depends heavily on time and cost involved. It is very important to have a development platform which is open source, affordable, flexible, production ready and scalable.
STMicroelectronics has introduced a STM32 open development environment platform which allows designers to develop products using ST microcontroller, sensors, RF and Analog products in a very flexible and affordable way. The hardware platform is complemented by software drivers, middleware libraries and applications. It also include associated Android and iOS code.
The user can also access many advance libraries by a simple computer based license agreement. Once the platform is tested designer can develop his custom PCB and load the firmware developed on this platform. The user will need to sign the production license for libraries only when he want to test on his custom board.
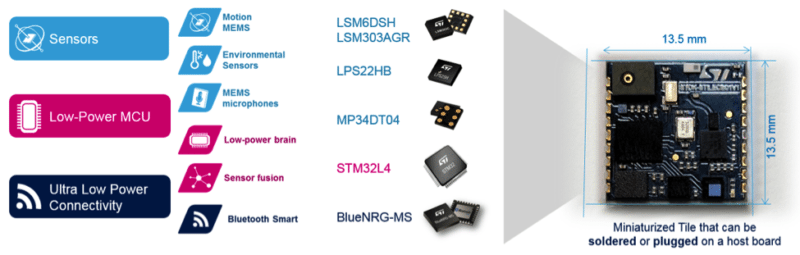
SensorTile
SensorTile is a miniaturized tile-shaped design platform. It includes all that is needed to remotely sense and measure motion, environmental and acoustical parameters. A drone developer can straightaway focus on aerodynamics, motor control and physical design of the drone without worrying about connectivity and sensor integration.
Conclusion
Drones are one of the most important innovation of recent past. With the advent of lower power sensor and connectivity technology drones are now used is wide range of consumer and industrial applications. Drones offers new opportunities for developers and startups as they are solving many complex problem which were unpractical and expensive earlier. STMicroelectronics recognizes drone an important market to focus and is focusing on products suitable for this segment.





