


The design utilizes Time-to-Digital Converter signal processing for depth sensing, enabling LiDAR ecosystem partners to develop their applications with depths up to 23 meters.
LiDAR, or Light Detection And Ranging, stands out as a premier technology for depth sensing, surpassing other methods due to its exceptional depth and angular resolution. Its effectiveness in all lighting conditions is attributed to its active methodology, which involves using an infrared light transmitter and a receiver. This technology generally employs the direct Time of Flight (dToF) measurement technique, which calculates the time delay between a transmitted signal and its return echo(es). Another method used is the indirect time-of-flight (iToF). Both dToF and iToF approaches can utilize pulsed or continuous modulation. This versatility has led to LiDAR’s widespread adoption in numerous markets, finding diverse applications in the automotive, industrial, robotics, and consumer augmented and virtual reality (AR/VR) sectors.
The direct time−of−flight depth sensing reference design from Onsemi uses a Time-to-Digital Converter (TDC) signal processing method featuring multi-shot histogram outputs for depth extraction. This design has been crafted to enable customers and partners within the LiDAR ecosystem to effectively utilize the company’s products and system solutions as a foundation for developing their designs.

Following the photon’s return, LiDAR system signal chains can employ Analog-to-Digital Converters (ADCs) or Time-to-Digital Converters (TDCs) to convert the detected laser echoes into digital form. Systems based on ADCs enable full pulse digitization, offering extra details about the target, such as reflectivity, which can be deduced from the pulse shape. In contrast, TDC-based systems provide cost and power benefits, as their discrimination circuits are simpler to implement. Additionally, TDC methods are well-suited for narrow pulse-width lasers, allowing for higher peak power per pulse while remaining within eye safety limits.
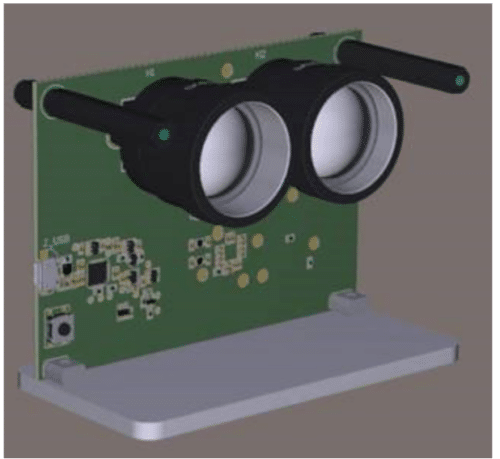
The design package includes a laser transmitter, optics, sensor, and a readout receive chain complete with FPGA code. It is designed to measure depths ranging from 1 to 23 meters, offering a convenient and integrated solution for LiDAR applications.

The transmission component of this system utilizes an OSRAM SPL PL 90_3, 905 nm laser diode to emit laser pulses towards a target. A MicroRB−10010−MLP−TR reference SiPM within the transmit lens detects the outgoing laser pulse, generating the initial signal for the Time-to-Digital Converter (TDC). On the receiving end, another MicroRB−10010−MLP−TR SiPM captures the reflected pulse. An amplification stage is integrated to detect low-intensity reflections, with the amplified signal providing the stop signal for the TDC.
The TDC functionality is embedded within an FPGA and timestamps the start and stop signals. Depth calculation to the target is achieved through histogram processing on the FPGA. The SiPM dToF LiDAR Reference Platform also includes a graphical user interface, enabling users to visualize histogram data and configure the laser rangefinder for single or multi-shot modes. Additionally, the GUI facilitates the adjustment of the SiPM sensitivity by modifying its bias voltage.
Onsemi has tested this reference design. It comes with a Bill of Material (BOM), schematics, etc. You can find additional data about the reference design on the company’s website.
