




Previously, we explored the ADAS (advanced driver assistance system), which used lidar, camera, and ROS for creation of the map.
Now we are adding an important safety system for ADAS so that you can check the relative speed of moving vehicles.
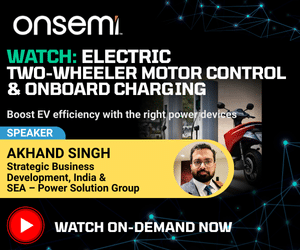
Also, it detects the lane and marks the safe distance from the front vehicle in real time using the radar (see Fig. 1).
POC Video Tutorial In English:
POC Video Tutorial In Hindi:
There are many lidar and radar systems available in the market for ADAS that can not only detect and map the environment but also tell us the speed of oncoming nearby vehicles as well as padestrians, and accurately measure the distance for ADAS and autonomous driving systems.
But since most of them are laser-based, they might not be very accurate in foggy or very low light conditions.

So here we use the doppler radar that can work in all types of light conditions and foggy environment as well. It is also capable of measuring very high speeds that most of the other systems fail to do.
The components required to build this RADAR ADAS System are listed in the below table.
| Bill of Materials | ||
| Component | Quantity | Description |
| Raspberry Pi/Nvidia Jetson (MOD1) | 1 | SBC |
| Raspberry Pi camera | 1 | CSI camera |
| HB100 radar (S1) | 1 | 10.525GHz radar sensor |
| LM358 amplifier (MOD2) | 1 | Signal amplifier module |
| 5V DC-DC power adaptor | 1 | 5V, 2A DC-DC power converter |
| Wires | 10 | Thin insulated wires |
Circuit Diagram
Fig. 2 shows the circuit diagram of the doppler radar in ADAS. It is built around Raspberry Pi (MOD1), LM358 module, HB100 doppler radar, Raspberry Pi camera, and a few other components.

