


 What if you had an extra pair of hands to carry out tasks somewhere else while you controlled them from another location wirelessly. Seems unrealistic, right? But it’s possible.
What if you had an extra pair of hands to carry out tasks somewhere else while you controlled them from another location wirelessly. Seems unrealistic, right? But it’s possible.
This project describes how to design a prosthetic hand that can replicate natural hand movements and muscle contractions. Although artificial, it works like a biological hand by following the muscle signals.
To achieve this, the muscle contraction and stress values are captured and then through muscle signals used to wirelessly control the prosthetic arm located somewhere else. The project can be developed further to help the physically challenged and also to grip objects lying in places where you do not want to dirty your own hands.

Assembly
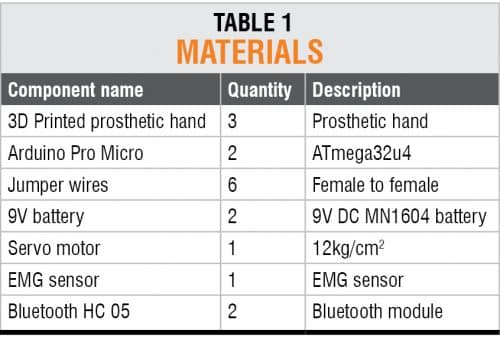
There are various open source prosthetic body parts available in the market. You can also 3D print them at home. In this project, the InMoov robotic arm has been used. After getting the required parts comprising fingers and servo, assemble the prosthetic hand as shown in the figures.




Coding
We need to make two devices—a prosthetic hand data transmitter and a prosthetic hand data receiver with servo move mechanism. For each of them we need to create separate codes.

Please register to view this article or log in below. Tip: Please subscribe to EFY Prime to read the Prime articles.
