




Researchers at Carnegie Mellon University’s Robotics Institute have created a system that enables an off-the-shelf quadruped robot to walk on a narrow balance beam, possibly in first attempt.
Modern quadruped robots have a torso and four rounded-foot legs, allowing basic surface traversal and stair-climbing. While resembling four-legged animals, they lack the agility of cheetahs or falling cats and require three feet on the ground to avoid tipping over. Walking on rough terrain is challenging due to poor balance when fewer than three feet are on the ground.
Researchers at Carnegie Mellon University’s Robotics Institute (RI) have designed a system that enables an off-the-shelf quadruped robot to walk on a narrow balance beam, possibly achieving this feat for the first time. The team improved quadruped balancing by using satellite control hardware.

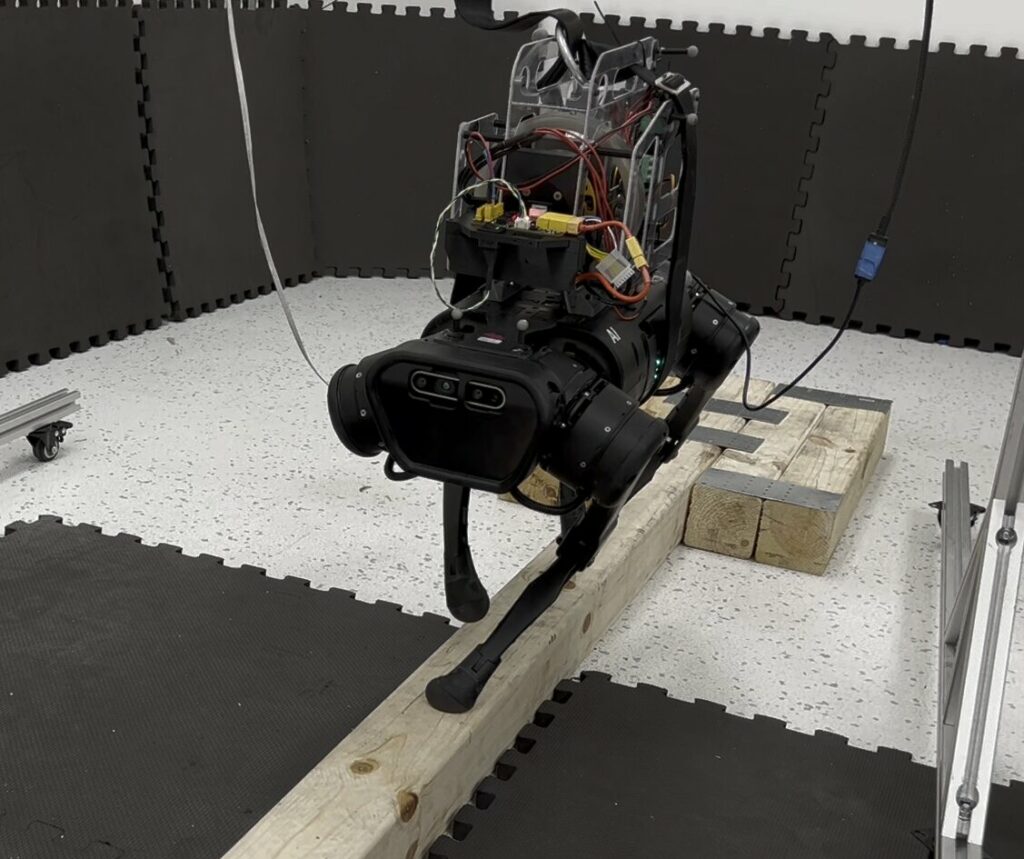
The researchers use a reaction wheel actuator (RWA) system attached to the quadruped’s back to balance independently of its feet’ positions. RWAs manipulate spacecraft angular momentum for satellite attitude control in aerospace. The team added a flywheel-motor mechanism to a quadruped robot’s body for spin effect. They controlled the momentum irrespective of leg contact by mounting 2 RWAs on the Unitree A1 robot’s pitch and roll axes. Modifying the control framework for RWAs was effortless as it doesn’t alter mass distribution or have joint limitations like a tail or spine. It can be modeled like a gyrostat and integrated into standard control algorithms.
The team conducted a sequence of successful experiments to assess their system, revealing the robot’s improved ability to rebound from sudden impacts. They emulated the well-known falling-cat scenario in simulation, flipping the robot upside down from almost half a meter and using the RWAs to reposition it mid-air and land upright. Physically, they showed the robot’s ability to regain stability and maintain balance by having it walk on a narrow 6-centimeter-wide beam.
Quadruped robots are predicted to become commercially available soon and could be used for critical missions like search-and-rescue with improved stabilizing abilities. The researchers also foresee quadrupeds dominating the robotics industry and becoming common in the wild in the near future.
Reference : Provided by Carnegie Mellon University

