



The latest artificial paw innovation promises to transform legged robots’ navigation across varied terrains, opening new possibilities in robotics.
Quadruped robots mimicking animal anatomy and motion have the potential to effectively undertake tasks in diverse environments, including outdoor natural landscapes. These robots must maintain stability and avoid obstacles or falls while navigating various surfaces like soil, sand, and grass for optimal performance.
Researchers from the Norwegian University of Science and Technology (NTNU) and the Indian Institute of Technology (IIT) Bombay have recently created an innovative artificial paw equipped with sensory features. This advancement aims to enhance the movement of legged robots across diverse terrains.

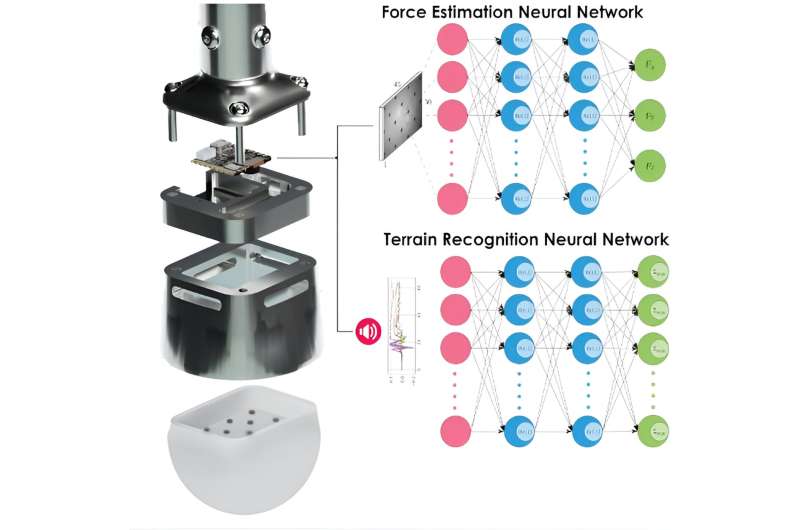
The team have embarked on a project to devise a system capable of collecting detailed, real-time data on terrains traversed by robots. Their innovation led to the creation of TRACEPaw, an artificial paw or foot designed to attach to the base of a robotic leg.
The system developed by the researchers resembles a paw that gathers diverse sensory information from its environment, especially the terrain beneath it. This data is then processed by a computer vision model, trained through supervised learning, to predict terrain characteristics and calculate the contact force. It does this by assessing the deformation of its silicon surface and analyzing the noise generated by the soil.
Another benefit of the sensing system developed by the research team is its construction using commonly available and off-the-shelf electronic components. This design choice enables easy and cost-effective large-scale production.
In a laboratory environment, the researchers conducted various experiments to assess the performance of their system. The preliminary results were very encouraging, indicating that TRACEPaw could significantly improve the agility and usefulness of legged robots by enabling them to identify and adjust to different terrains.
Looking ahead, the artificial paw developed by Barnwal, Olsen, Alexis, and Vangen has the potential to enable the use of legged robots in real-world scenarios, such as search and rescue operations or exploration tasks. The team is focused on enhancing its system by training its algorithm with additional data to improve its capabilities in force estimation and soil classification.
Reference: Aleksander Vangen et al, Terrain Recognition and Contact Force Estimation through a Sensorized Paw for Legged Robots, arXiv (2023). DOI: 10.48550/arxiv.2311.03855
