




A method for detecting wind direction with unprecedented accuracy using strain sensors and neural networks, inspired by the natural flight control of birds and insects.
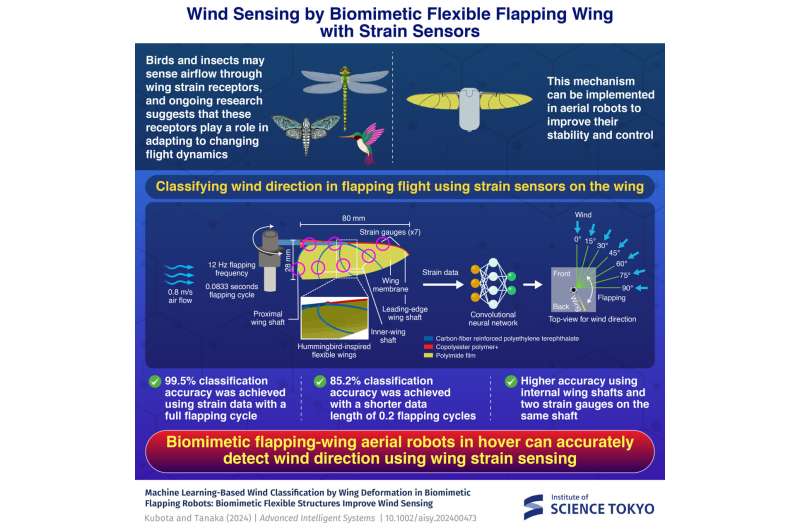
Researchers from the Institute of Science Tokyo have developed a bio-inspired wind sensing method for robotic flight, achieving a 99% accuracy rate. This innovation leverages strain sensors on flexible wings and a convolutional neural network (CNN) model to detect wind direction, mimicking the natural strain receptors found in birds and insects.
Led by Associate Professor Hiroto Tanaka, the team explored the use of strain gauges on hummingbird-inspired wings to measure wind flow during tethered flapping tests in a controlled wind tunnel. The robotic wings, designed with tapered shafts and lightweight film, flapped at 12 cycles per second under various wind conditions, ranging from no wind to directional flows of up to 90 degrees.
Seven strain gauges were embedded in the wings, collecting data that was fed into a CNN model for analysis. The results were striking: a full flapping cycle produced a classification accuracy of 99.5%, while even shorter datasets from 0.2 cycles maintained an impressive 85.2% accuracy.
Further experiments demonstrated the importance of multiple sensing points and biomimetic wing structures. Using just one gauge resulted in a drop in accuracy to 65.6% for shorter cycles, while eliminating the inner wing shafts led to performance decreases of up to 7.2%.

“Small aerial robots face significant constraints in size and weight, making traditional flow-sensing devices impractical. Our study shows that wing strain sensing offers a lightweight, cost-effective solution for real-time wind detection,” explained Tanaka.
The team mentions that this research paves the way for flapping-wing robots to adapt dynamically to wind conditions, potentially revolutionizing applications such as surveillance, disaster response, and ecological monitoring. By mimicking nature’s mechanisms, the research underscores the potential of bio-inspired designs in advancing robotic capabilities.
