This design combines energy-efficient take-offs with seamless mobility across diverse terrains, opening new horizons for search-and-rescue missions, environmental monitoring, and beyond.
A team of researchers from École Polytechnique Fédérale de Lausanne (EPFL) and the University of California, Irvine, has unveiled a groundbreaking drone design capable of switching seamlessly between ground and aerial locomotion. Dubbed RAVEN (Robot Avian-inspired Vehicle for Multiple Environments), the robot mimics the multimodal capabilities of birds, combining walking, hopping, and flight in a single system.
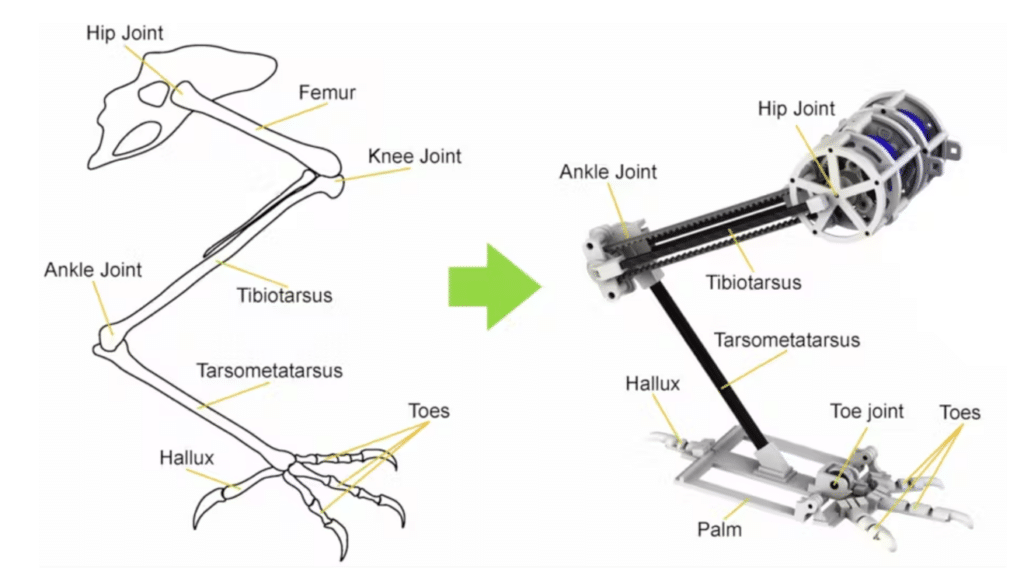
“Birds have evolved forelimbs as wings for flight and hindlimbs for walking, hopping, leaping, and jumping take-offs, enabling them to navigate diverse environments,” the researchers explain. Inspired by this biological versatility, the team aimed to engineer a robotic system that could operate efficiently across multiple terrains. Their innovation addresses the complexity that has hindered previous attempts at such adaptable designs.
RAVEN achieves this by using multifunctional legs that allow the drone to walk, leap, and transition seamlessly into flight. The researchers emphasize the importance of jumping for take-off, noting that it significantly increases initial flight speed while being more energy-efficient than take-offs without a leap. This dual capability opens up new possibilities for deploying drones in environments with challenging terrains, enhancing their utility in diverse applications.
The potential of RAVEN goes beyond its innovative locomotion. By combining ground and aerial capabilities, it offers an edge in tasks that require versatility, such as search-and-rescue operations, environmental monitoring, and urban logistics. Its design could also inspire the next generation of autonomous vehicles capable of navigating complex terrains.

The research findings have been published in Nature under closed-access terms, with additional insights provided in an article by IEEE Spectrum. The drone represents a significant step toward creating robotic systems that bridge the gap between aerial and terrestrial mobility, drawing inspiration from nature to solve engineering challenges.