


These advancements are anticipated in construction machinery, agricultural machines, and military unmanned ground vehicles.

Technologies for recognising off-road environments that detect substances like dust, mud, snow, or rain during the autonomous driving of construction machinery, agricultural machines, and unmanned ground vehicles (UGVs) have been developed for the first time in the country. These technologies can remove sensor signals of these substances in real-time. It is anticipated that these technologies will soon be utilised in industrial machinery such as excavators, dump trucks, search vehicles, and military self-driving cars to ensure a safe working environment for operators.

The research team, led by Senior Researcher Han-Min Lee at the Department of Industrial Machinery DX under the Virtual Engineering Platform Research Division of the Korea Institute of Machinery and Materials (KIMM), has created technologies for driving in off-road settings such as mountainous, waterside, or snowy areas. These technologies include sensor protection and cleaning, sensor signal correction, and drivable area recognition, and have been transferred to relevant corporations.

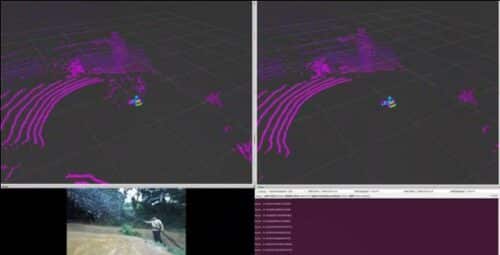
The sensor protection and cleaning module helps clean sensors by spraying detergents on substances like muddy water or mud that may splash onto the sensors during off-road driving and wiping them away in real time with a wiper, effectively removing contaminants. The sensor signal correction technology helps remove small extraneous substances like dust, snow, and rain during driving, allowing for more stable off-road driving even in challenging weather conditions.
The drivable area estimation technology detects obstacles and challenging terrain features such as steep slopes, potholes, and bumpy roads. It automatically identifies alternative routes to avoid these obstacles, helping to prevent collisions. The team has developed driving control technology that allows real-time vehicle driving management by selecting only the necessary functions from the various technologies available.
Previously, there was no sensor protection technology suitable for off-road environments where dirt and mud adhere to vehicles, nor technology capable of real-time removal of sensor signals of extraneous substances included in LiDAR or camera sensor signals. There was also a lack of real-time drivable area estimation technologies that could recognize both solid and hollow obstacles like cliffs and pits.
The newly developed off-road environment recognition technologies have improved processing speed by more than 1.5 times while maintaining performance indicators such as sensor contamination recovery rate, sensor noise removal accuracy, and off-road drivable area estimation accuracy at levels equal to or higher than existing technologies, paving the way for practical use in controlling off-road autonomous driving.
