




This robot showcases the advancement of aerial robotics, with potential applications in wildlife monitoring, disaster response, and agriculture.
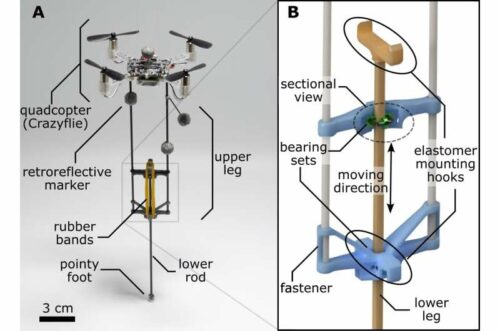
Quadcopters have gained popularity for recreational, surveillance, and research purposes due to their aerial capabilities. However, enhancing flight time and payload capacity has been challenging. The team’s solution involves attaching a spring-loaded telescopic leg, acting like a pogo stick, beneath the quadcopter. This addition enables the quadcopter to hop when needed, reducing battery drain and enabling it to carry heavier loads by hopping instead of continuously lifting them.
A team of engineers from the City University of Hong Kong and the Hong Kong University of Science and Technology has developed a novel hopping robot by integrating a spring-loaded telescopic leg with a quadcopter. Published in Science Robotics, this innovation addresses key limitations of quadcopters, namely flight time and payload capacity.
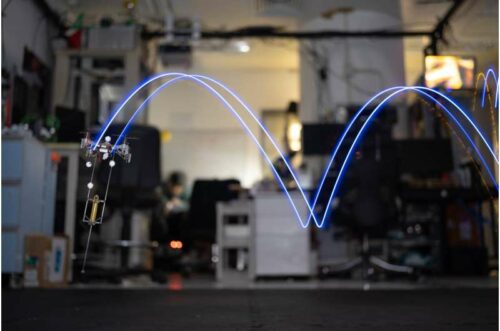
The researchers ensured the leg’s stability and added hopping capabilities, allowing the robot to move seamlessly between locations. Besides vertical hops, the robot can hop on uneven surfaces and even move horizontally, as a protective bumper against walls or structures. Weighing approximately 35 grams and the size of a bird, the robot has various potential applications. It could monitor wildlife by hopping among tree branches, aid in disaster areas for assessments and locating survivors, or be used in agriculture to monitor soil and moisture levels. This innovative robot showcases the interdisciplinary
References: Songnan Bai et al, An agile monopedal hopping quadcopter with synergistic hybrid locomotion, Science Robotics (2024). DOI: 10.1126/scirobotics.adi8912

