



Researchers at the University of the Sunshine Coast have developed a lizard-inspired robot that blends leg and spine movements to explore evolutionary locomotion.
Can a robot mimicking a climbing and walking lizard give new insights into the evolution and advantages of different movements in humans and other animals? The answer is yes. The University of the Sunshine Coast researchers have developed a lizard-inspired robot capable of running on level surfaces and climbing. They combined biology, robotics, and mathematics based on lizard locomotion to determine whether moving with legs or the spine was more efficient.
The researchers have explained that optimal locomotion required both spine and limb movement, which closely matched movement patterns in lizards. These findings help detail the evolutionary trade-offs between speed, efficiency, and stability and determine the relative influence of these selection pressures on locomotion.

The team noted that movement patterns vary considerably among vertebrates, from the lateral spine-based movements of fish and salamanders to the predominantly limb-based movements of mammals and birds. However, lizards use both their limbs and spines, making them ideal for studying the evolutionary changes in locomotion.
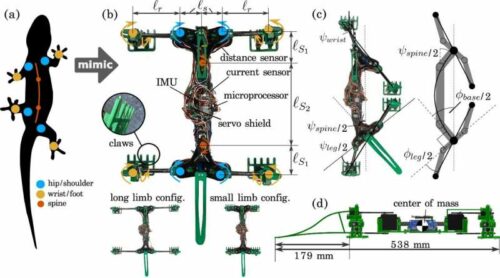
The research team’s lizard-inspired robot could run on level surfaces and climb on inclined or vertical surfaces, with adjustable leg lengths and the ability to modify its spine and limb range of motion and stride speed.
The team explained that they built a performance landscape to evaluate the robot’s climbing efficiency and stability. This data was mapped with findings from a theoretical two-dimensional model of lizard locomotion and measurements of over 40 species of climbing and running lizards. They determined several engineering criteria for developing limbed robotic devices capable of traversing diverse environments.
One key insight was that lateral spine undulation, while less important for maximizing robotic speed, can significantly reduce energy consumption. This understanding may also help design faster, more stable, and efficient robotic strides, contributing to the development of advanced robotic systems that can operate effectively in various settings.
Reference: Robert Rockenfeller et al, Coordinating limbs and spine: (Pareto-)optimal locomotion in theory, in vivo, and in robots, npj Robotics (2024). DOI: 10.1038/s44182-024-00011-2
