



A microrobot could change infertility treatment, offering a less invasive way to clear fallopian tube blockages. Curious? Learn more!
Infertility impacts around 186 million people globally, with fallopian tube obstruction causing 11%-67% of cases in women. Researchers from the SIAT Magnetic Soft Microrobots Lab have introduced a new approach using a magnetically controlled robotic microscope to treat blockages in the fallopian tubes.
The researchers say this technology offers a potentially less invasive alternative to traditional surgical methods currently used to clear tubal obstructions, which often involve conventional catheters and guidewires.

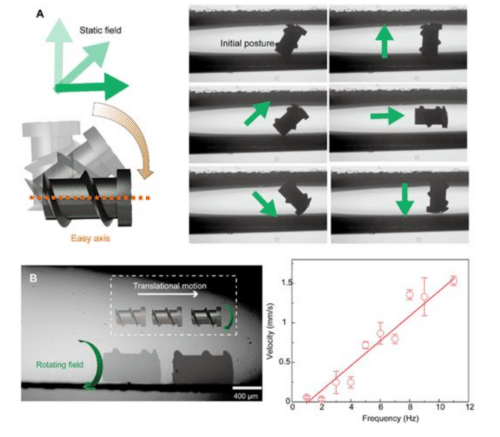
The microrobot is constructed from nonmagnetic photosensitive resin and coated with a thin layer of iron to give it magnetic properties. When an external magnetic field is applied, the robot rotates, creating translational motion that allows it to move through a glass channel that simulates a fallopian tube. The robot successfully clears a cell cluster obstruction placed in the channel, representing a typical blockage in the female reproductive system. This magnetic control enables precise navigation through the delicate, narrow structures of the fallopian tube.
The microrobot’s design is another key innovation, featuring a screw-shaped body with a helical structure, a cylindrical central tube, and a disk-shaped tail. The helical structure is essential for propulsion, while the disk-shaped tail stabilizes the robot’s movement. As the screw rotates, it creates a vortex field that pushes fragmented debris toward the tail, effectively clearing the blockage.
In tests, the microrobot proved both effective and efficient at removing the simulated blockage, with the rotating screw’s vortex helping to move debris away from the obstruction.
Looking ahead, the research team plans to miniaturize and enhance the microrobot. They aim to test it in isolated organ models and integrate it into vivo imaging systems to track its movement and position in real-time. The team envisions expanding the robot’s use in surgery with automatic control systems to improve the efficiency of blockage removal and other medical procedures.
Reference: Xiangchao Liu, Yuan Liu, Jing Huang, Xuhui Zhao, Jiangfan Yu, Xiaopu Wang, Haifeng Xu. Magnetically-driven robotic microscrew for the oviduct recanalization. AIP Advances, 2024; 14 (12) DOI: 10.1063/5.0233734
