



This sensor, leveraging vision-based technology and fiber optic bundles, is set to transform medical diagnostics and robotic systems with its ability to discern between healthy and unhealthy tissue and its potential integration into prosthetics and AI-driven manipulation tasks.

Researchers from Meta AI, Stanford University, Technische Universität Dresden, and the German Cancer Research Center (DFKZ) have developed a miniature tactile sensor called DIGIT Pinki. This sensor is designed to mimic human touch in a compact form, making it suitable for integration into medical technologies and robotic systems. It builds on previous tactile sensor designs, such as DIGIT and OmniTact, and incorporates ideas from the 1980s. The sensor uses a vision-based approach, with a miniature camera capturing images of deformations in an optically clear gel fingertip when it comes into contact with objects. Machine learning algorithms are then trained on these images to accurately interpret tactile information, such as contact forces.
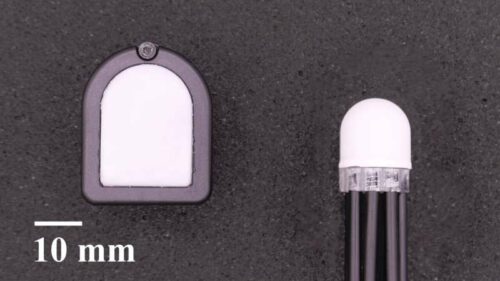
A key innovation in DIGIT Pinki is the use of fiber optic bundles to relay images to a remotely located camera, allowing for a significant reduction in the size of the gel fingertip. This design also ensures that the fingertip is non-magnetic and contains no electronics, making it suitable for use in medical applications, such as MRI machines. The researchers have created a prototype sensor with a tip diameter of 15 millimeters, roughly the size of a woman’s index fingertip. Made of silicone, this artificial sensing fingertip has no sensitive electronic or magnetic components, making it safe for use inside the human body.

Preliminary results show that the sensor can discriminate between healthy and unhealthy tissue in medical-grade phantoms and ex vivo posterior prostate tissue. This suggests that the sensor could be used in developing new medical technologies for detecting tissue abnormalities and in creating robotic systems with slim, sensitive artificial fingertips capable of manipulating objects with greater dexterity. Future work includes extending this technology for other medical applications, such as palpating the cervix, and exploring the use of artificial intelligence to interpret touch signals for manipulation. The researchers are also interested in the potential for incorporating highly sensitive fingertips into prosthetic hands.
References: Julia Di et al, Using Fiber Optic Bundles to Miniaturize Vision-Based Tactile Sensors, arXiv (2024). DOI: 10.48550/arxiv.2403.05500
