



What if robots could navigate any terrain without extra sensors or training? Learn how a new approach makes this possible, with results in real-world environments.
Researchers from the University of Leeds and University College London have developed a framework that allows robots to navigate complex terrains without needing additional sensors or prior training on rough surfaces.
Over the past decade, programming quadruped robots have evolved from manually hard-wiring instructions to utilizing neural networks and machine learning for artificial intelligence implementation. In this study, the researchers highlighted how deep-learning reinforcement training has significantly improved navigational capabilities in quadruped robots. However, they pointed out a common limitation: these robots rely on a single gait strategy.

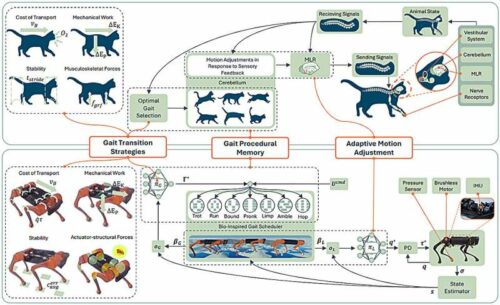
The researchers propose a more effective approach that mirrors how four-legged animals move across terrain. By incorporating a variety of gaits—such as running, trotting, or hopping—the robot could adapt its movement to the terrain, optimizing its efficiency based on the environment.
They note that running is ideal for relatively smooth, uniform terrain. At the same time, trotting is more effective for navigating irregular surfaces, such as varying pebble sizes or small obstacles like twigs or bushes. Hopping, on the other hand, is usually the best option for sticky or challenging conditions.
To enable a quadruped to adjust its gait based on its immediate surroundings, the researchers developed a bio-inspired gait scheduler (BGS) that integrates βL encoding into the robot’s observable space. This approach utilizes pseudo-gait procedural memory and adaptive motion behaviour adjustments.
This system enhances the robot’s adaptability by allowing it to alter its gait in response to varying environmental conditions. It also enables the robot to learn and adapt autonomously across diverse terrains in a zero-shot manner without the need for additional sensors.
In testing a quadruped equipped with their new framework, the researchers found it capable of smoothly navigating a wide range of terrains—even those that changed rapidly. They propose that robots using this framework better suit unpredictable, real-world environments.
Reference: Joseph Humphreys et al, Learning to Adapt: Bio-Inspired Gait Strategies for Versatile Quadruped Locomotion, arXiv (2024). DOI: 10.48550/arxiv.2412.09440
