



The robotic gripper uses Van der Waals force for grasping soft objects with delicate strength to avoid damaging them
A robotic hand is known to be powerful enough for firmly clamping and picking up a rigid object – no matter its weight.
But unlike human hands, robotic hands cannot distinguish between objects based on their composition. For instance, while a human hand can gently grip a tomato, a robotic hand will press it tightly and squeeze it, eventually ruining everything. A robotic gripper can’t do two things at once, that is, hold an object tightly and gently when required.

Wide implementation of robots in manufacturing and our lives requires this problem to be corrected.
Fortunately, now there’s a solution.
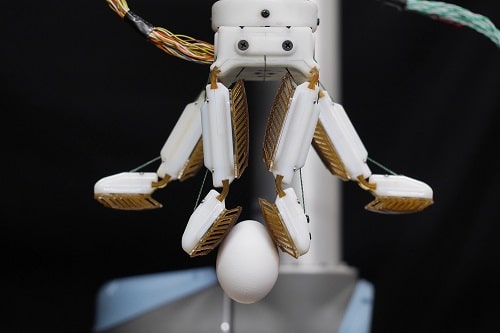
Engineers at Stanford University have developed a robotic hand called ‘farmHand’ capable of handling various items from raw eggs and grape bunches to jugs and basketballs.
Inspired by geckos, the robotic hand has a similar way of attaching its grippers to an object, without applying extra inward forces.
Developed at the Biomimetics and Dextrous Manipulation Lab at Stanford University, the anthropomorphic gripper has a gecko-like adhesive on the inner surface of its claws that creates a strong grip via microscopic flaps.
On coming in contact with an object’s exterior surface, the flaps create Van der Waals forces, allowing the adhesive to grip strongly with only adequate pressure.
“The first applications of the gecko adhesives had to do with climbing robots, climbing people or grasping very large, very smooth objects in space. But we’ve always had it in our minds to use them for more down-to-earth applications,” said Mark Cutkosky, professor of mechanical engineering, School of Engineering, Stanford University.
Below the adhesives are farmHand’s finger pads made of a flexible rib structure that buckles with little force. The ribs ensure equal distribution of forces on the adhesive pads to prevent unwanted slipping/sliding of the held object.
“If you move these ribs, the buckling results in a similar force no matter where you start,” said Dane Brouwer, a graduate student in the Biomimetics and Dextrous Manipulation Lab, Stanford University.
The farmHand can be easily controlled for gripping objects having flat surfaces but challenging for curved objects. Therefore, farmHand achieves more surface area by using pad-to-pad pinching for grasping objects at various angles, unlike conventional robotic hands that pinch objects in a ‘C’ shape, like picking something up with only the tip of your fingers.
An intensive 3D printing of soft objects also benefitted the testing process, thereby replacing complex existing computer simulations.
“You’ll see robotic hands do a power grasp and a precision grasp and then kind of imply that they can do everything in between,” said Wilson Ruotolo, former graduate student in the Biomimetics and Dextrous Manipulation Lab at Stanford University. “What we wanted to address is how to create manipulators that are both dexterous and strong at the same time.
The team is incorporating further improvements to farmHand in the form of feedback features that would help users understand its gripping functionalities and how it could grip better while in use.
