


A team of researchers from Japan has invented a unique system that automatically designs robots and could simultaneously improve their shape, structure, movements, and controller components
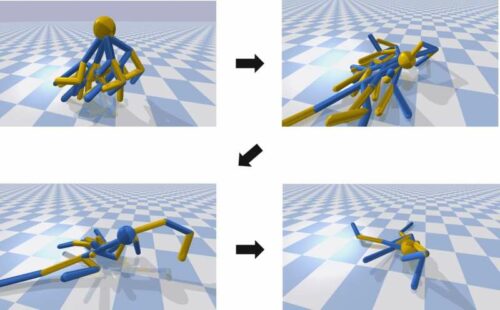
Currently, walking robots mostly have morphologies resembling vertebrates such as a dog. The researchers say that if imitate the evolution of vertebrates, we could design robots with performance comparable to these practical robots. Hence, a recent study published in Artificial Life and Robotics describes about a new, automatic approach for designing robots that follow the so-called “improvement rule” as it was specifically trained to design robots removing unnecessary rigid parts from a previously developed complex robot. This approach is inspired by the evolution of vertebrates and allows it to identify more essential morphologies and controller components for the newly designed robot.
“The automatic robot design is a completely novel research project for the Matsuno Lab, the laboratory led by Fumitoshi Matsuno, and this is the first paper published for this project,” Ryosuke Koike, one of the researchers who carried out the study, told TechXplore. “Its primary objective was to design a good-performing robot for a given task. Since there are innumerable possible combinations of robot morphologies and controllers, it is impossible to reach the best robot by manual human exploration. Therefore, we realized that it is necessary to establish a method for automatically designing robots using computers.”

Researchers experimented their automatic robot design system with series of tests, where they compared it with other robotic design strategies. They found that the method’s vertebrate evolution-inspired improvement rule led to the creation of simplified and yet interesting robot designs.
“The discrete factors of robot morphology—how many rigid parts a robot needs and how they should be connected—are difficult to handle theoretically, so they have largely depended on the designers’ experience and intuitions,” Koike said. “Or, in recent studies considering automatic robot design, they have often been explored in an almost exhaustive way. We made the search more efficient by setting a simple rule: monotonically reduce the number of rigid parts.”
Koike and his colleagues plan to explore the potential of other possible approaches for automatically designing robots, which would be an alternative method that overcomes some of the limitations of their robot design approach
Click here for the Published Research Paper
