


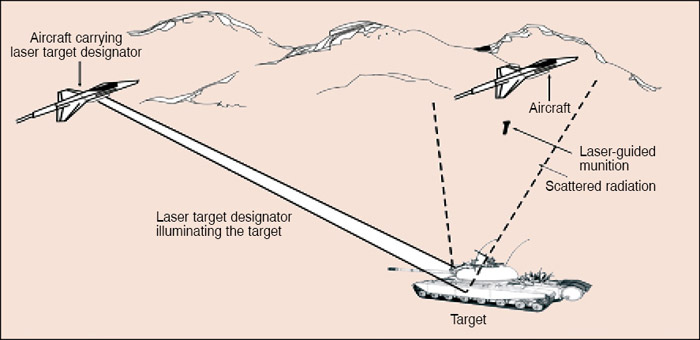
The quadrant photo sensor is placed before the focal plane of front-end optics. The focal spot is symmetrical to the centre of the quadrant photo sensor when the perpendicular to focal plane of the detector is collinear with the axis of received laser radiation scattered from the intended target as shown in Fig. 4(a). This is the case when the weapon is pointing precisely towards the target.
If the laser radiation is impinging on the laser seeker cross-section at an angle, which will be the case when the weapon is not pointing towards the intended target, the centre of the focused laser spot will shift depending upon angular error in azimuth and elevation as shown in Figs 4(b) to 4(e).
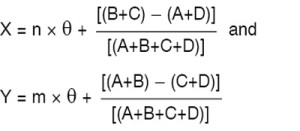
The beam position in X and Y directions is calculated using the following equations; X and Y represent angular errors in azimuth and elevation directions:


where A, B, C and D are electrical voltages corresponding to laser power falling on the four quadrants. In the case of precise pointing towards the target, all four power levels are equal, and therefore X=0 and Y=0. A+B+C+D represents total power, and division by total power ensures that the calculated position error is independent of laser-intensity variations.
Output analogue signals proportional to the magnitude of laser power falling on four quadrants are digitised and then processed to compute X and Y. Error signals X and Y are then used to guide the weapon towards the desired position of null with canards driven by a servo control system. The maximum value of the proportional field-of-view offered by the laser seeker of this type in X and Y directions is proportional to ±R where R is the radius of the focused laser spot. Larger spot size gives a larger field-of-view but a lower angular resolution. Radius of the focused spot can at the most be equal to half of the radius of the quadrant active area.
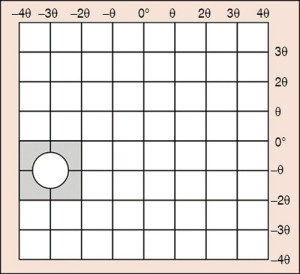
In another position sensing technique that uses a two-dimensional array based sensor, each active element in the array is identified by a unique azimuth and elevation angle. The focused spot at any time covers more than one active element, and the angular error in azimuth and elevation is computed from following equations. Fig. 5 explains the concept.
where θ is the proportional field-of-view of each miniature quadrant. n and m are constants, depending upon the illuminating quadrant. A, B, C and D are electrical voltages corresponding to laser power falling on the four quadrants.
Important parameters
Major performance parameters of laser-guided munitions include sensitivity, field-of-view, PRF code compatibility and response linearity. In addition, immunity to false codes and response to desired code in the presence of false code are other important parameters relevant to assessing performance efficacy of laser-guided munitions.
Sensitivity is the minimum value of laser power density impinging on the laser seeker cross-section in a plane orthogonal to the optical axis of the seeker head to which it can respond satisfactorily. It is a characteristic of the seeker’s front-end optics and photo sensor. Sensitivity of the seeker decides the maximum guidance range for known values of laser target designator parameters, target reflectivity, height of laser target designator (in case of airborne laser designator) and laser seeker above sea surface and visibility conditions.
Field-of-view determines the probability of the weapon finding itself within the laser basket at maximum guidance range. Laser-guided munitions using a seeker head having larger field-of-view would have a higher probability of finding themselves in the laser basket and subsequently precisely hit the intended target.
PRF code compatibility is the primary requirement for the weapon to function. This means the PRF code of the received laser radiation would be the same as the PRF code programmed in the guidance unit before the start of mission. The code is usually expressed as time interval between two successive laser pulses in milliseconds, usually up to the third decimal place. Two codes are considered compatible if the difference in time periods of the two codes is less than a certain specified value.
