



An ROV (remotely operated vehicle) is a device that can be controlled and operated from a distance. These mobile devices can be wired or wireless. They are sent to areas that humans may not be able to venture into, such as deep underwater regions. An underwater ROV can be used for an endless number of applications, including but not limited to deep sea exploration, studying marine life and examining debris.
The first tethered underwater ROV was built by Dimitri Rebikoff in 1953 and named as POODLE. Following this, in the 1960’s it began to be used for navy purposes and was later used by industries for the development of offshore oil fields. By the 1990’s most of the offshore requirements were fulfilled by the ROV’s and dependencies on human divers greatly reduced. Despite these advancements, they were extremely expensive devices and limited to defense or industrial applications.
In 2013, what began as a hobby project to investigate the presence of a rumored hidden underwater treasure off the coast of California soon developed into a full-fledged open source ROV community. David Lang, an inventor and author of Zero to Maker and Eric Stackpole, a former NASA engineer built an underwater robot and put up all the source code and design files online, open to be viewed and modified by anyone. They began a Kickstarter campaign, receiving nearly five times the goal amount that enabled them to commercially make the product available as a DIY kit to budding enthusiasts.

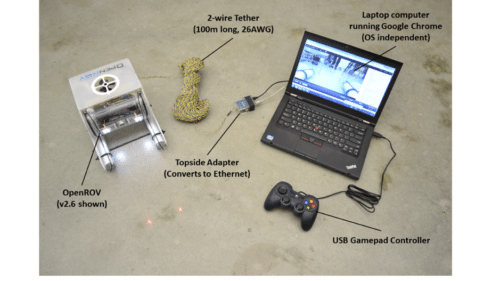
Coming to the product, the current version is the OpenROV 2.8. Let us first examine the basic constituents that makeup such a device. It consists of a camera equipped with LED lights to make viewing easier since deeper waters are darker and require illumination. Thrusters are provided to facilitate movement in each direction. A chassis that is the frame to a house and protect the electronic components which include the microprocessor, sensors, lasers, rechargeable batteries. A tether or wire is connected at one end to the ROV and at the other end to a computer through which a live feed can be viewed and the vehicle can be controlled.
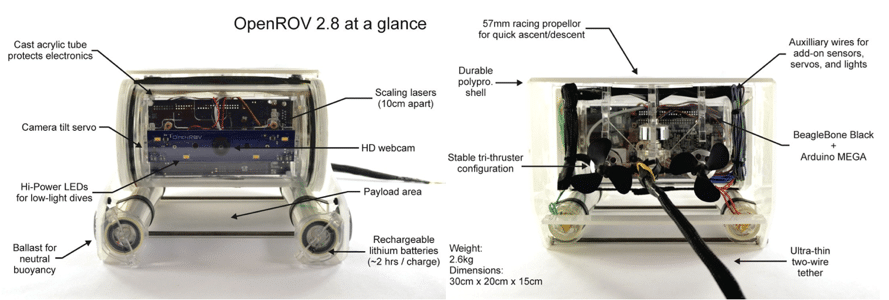
The OpenROV 2.8 that is assembled from the kit has a BeagleBone Black and an Arduino Mega. An HD webcam along with audio, red scaling lasers, LED’s with a brightness of 200lm, additional payload area to place any equipment. The maximum supported tether length is of 300m the vehicle can go up to a depth of 100m underwater, and the device weighs 2.6kg. It is powered by rechargeable lithium-ion batteries which provide a battery life of 2-3 hours. The vehicle can be put together using simple electrical equipment and to be operated requires simply a laptop with an OS/X/Windows/Linux operating system and the latest version of the Chrome browser, as it has an easy to use web browser interface.
Thus, the OpenROV is not just a product, it is a community, with users and contributors from across the globe. It aims at making exploration more accessible to everyone, technology enthusiasts and marine lovers alike.
Glossary
BeagleBone Black
The BeagleBone Black is a single-board computer (SBC). It contains an AM335x ARM® Cortex-A8 which is a microprocessor with some peripherals, including two 32-bit 200 MHz co-processors intended for real-time processing.
Arduino Mega
The Arduino Mega is a micro controller board based on the ATmega2560. It has 54 digital input/output pins, 16 analog inputs, 4 UARTs (hardware serial ports), a 16 MHz crystal oscillator, a USB connection, a power jack, an ICSP header, and a reset button.
References
- openrov
- TEDTalk

Great! Detailed ROV explanation at a layman level, easy to understand, grasp and even replicate.
??
Incredible, so informative.
Thank you for your feedback.
Very lucidly explained with proper mixture of technical and common lingo.